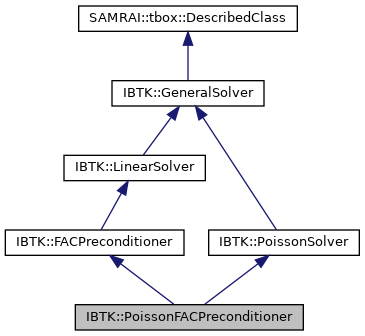
Class PoissonFACPreconditioner is a FACPreconditioner that has been specialized for Poisson problems.
#include <ibtk/PoissonFACPreconditioner.h>
Public Member Functions | |
| PoissonFACPreconditioner (const std::string &object_name, SAMRAI::tbox::Pointer< PoissonFACPreconditionerStrategy > fac_strategy, SAMRAI::tbox::Pointer< SAMRAI::tbox::Database > input_db, std::string default_options_prefix) | |
| ~PoissonFACPreconditioner ()=default | |
| void | setPoissonSpecifications (const SAMRAI::solv::PoissonSpecifications &poisson_spec) override |
| Set the SAMRAI::solv::PoissonSpecifications object used to specify the coefficients for the scalar-valued or vector-valued Laplace operator. More... | |
| void | setPhysicalBcCoef (SAMRAI::solv::RobinBcCoefStrategy< NDIM > *bc_coef) override |
| Set the SAMRAI::solv::RobinBcCoefStrategy object used to specify physical boundary conditions. More... | |
| void | setPhysicalBcCoefs (const std::vector< SAMRAI::solv::RobinBcCoefStrategy< NDIM > * > &bc_coefs) override |
| Set the SAMRAI::solv::RobinBcCoefStrategy objects used to specify physical boundary conditions. More... | |
Linear solver functionality. | |
| void | setHomogeneousBc (bool homogeneous_bc) override |
| Set whether the solver should use homogeneous boundary conditions. More... | |
| void | setSolutionTime (double solution_time) override |
| Set the time at which the solution is to be evaluated. More... | |
| void | setTimeInterval (double current_time, double new_time) override |
| Set the current time interval. More... | |
| bool | solveSystem (SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &x, SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &b) override |
| Solve the linear system of equations \(Ax=b\) for \(x\). More... | |
| void | initializeSolverState (const SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &x, const SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &b) override |
| Compute hierarchy dependent data required for solving \(Ax=b\). More... | |
| void | deallocateSolverState () override |
| Remove all hierarchy dependent data allocated by initializeSolverState(). More... | |
Linear solver functionality. | |
| virtual void | setNullSpace (bool nullspace_contains_constant_vec, const std::vector< SAMRAI::tbox::Pointer< SAMRAI::solv::SAMRAIVectorReal< NDIM, double >>> &nullspace_basis_vecs=std::vector< SAMRAI::tbox::Pointer< SAMRAI::solv::SAMRAIVectorReal< NDIM, double >>>()) |
| Set the nullspace of the linear system. More... | |
| virtual bool | getNullSpaceContainsConstantVector () const |
| Get whether the nullspace of the linear system contains th constant vector. More... | |
| virtual const std::vector< SAMRAI::tbox::Pointer< SAMRAI::solv::SAMRAIVectorReal< NDIM, double > > > & | getNullSpaceBasisVectors () const |
| Get the basis vectors for the nullspace of the linear system. More... | |
Functions to access solver parameters. | |
| virtual bool | getInitialGuessNonzero () const |
| Get whether the initial guess is non-zero. More... | |
General-purpose solver functionality. | |
| const std::string & | getName () const |
| Return the object name. More... | |
| virtual bool | getIsInitialized () const |
| Return whether the operator is initialized. More... | |
| virtual bool | getHomogeneousBc () const |
| Return whether the solver is using homogeneous boundary conditions. More... | |
| virtual double | getSolutionTime () const |
| Get the time at which the solution is being evaluated. More... | |
| virtual std::pair< double, double > | getTimeInterval () const |
| Get the current time interval. More... | |
| virtual double | getDt () const |
| Get the current time step size. More... | |
| virtual void | setHierarchyMathOps (SAMRAI::tbox::Pointer< HierarchyMathOps > hier_math_ops) |
| Set the HierarchyMathOps object used by the solver. More... | |
| virtual SAMRAI::tbox::Pointer< HierarchyMathOps > | getHierarchyMathOps () const |
| Get the HierarchyMathOps object used by the solver. More... | |
Functions to access solver parameters. | |
| virtual int | getMaxIterations () const |
| Get the maximum number of nonlinear iterations to use per solve. More... | |
| virtual void | setAbsoluteTolerance (double abs_residual_tol) |
| Set the absolute residual tolerance for convergence. More... | |
| virtual double | getAbsoluteTolerance () const |
| Get the absolute residual tolerance for convergence. More... | |
| virtual void | setRelativeTolerance (double rel_residual_tol) |
| Set the relative residual tolerance for convergence. More... | |
| virtual double | getRelativeTolerance () const |
| Get the relative residual tolerance for convergence. More... | |
Functions to access data on the most recent solve. | |
| virtual int | getNumIterations () const |
| Return the iteration count from the most recent solve. More... | |
| virtual double | getResidualNorm () const |
| Return the residual norm from the most recent iteration. More... | |
Protected Member Functions | |
| void | initSpecialized (const std::string &object_name, bool homogeneous_bc) override |
Protected Attributes | |
| SAMRAI::solv::PoissonSpecifications | d_poisson_spec = SAMRAI::solv::PoissonSpecifications("") |
| std::unique_ptr< SAMRAI::solv::RobinBcCoefStrategy< NDIM > > | d_default_bc_coef |
| std::vector< SAMRAI::solv::RobinBcCoefStrategy< NDIM > * > | d_bc_coefs |
Private Member Functions | |
| PoissonFACPreconditioner ()=delete | |
| Default constructor. More... | |
| PoissonFACPreconditioner (const PoissonFACPreconditioner &from)=delete | |
| Copy constructor. More... | |
| PoissonFACPreconditioner & | operator= (const PoissonFACPreconditioner &that)=delete |
| Assignment operator. More... | |
Functions to access solver parameters. | |
| void | setInitialGuessNonzero (bool initial_guess_nonzero=true) override |
| Set whether the initial guess is non-zero. More... | |
| void | setMaxIterations (int max_iterations) override |
| Set the maximum number of iterations to use per solve. More... | |
| void | setMGCycleType (MGCycleType cycle_type) |
| Set the multigrid algorithm cycle type. More... | |
| MGCycleType | getMGCycleType () const |
| Get the multigrid algorithm cycle type. More... | |
| void | setNumPreSmoothingSweeps (int num_pre_sweeps) |
| Set the number of pre-smoothing sweeps to employ. More... | |
| int | getNumPreSmoothingSweeps () const |
| Get the number of pre-smoothing sweeps employed by the preconditioner. More... | |
| void | setNumPostSmoothingSweeps (int num_post_sweeps) |
| Set the number of post-smoothing sweeps to employ. More... | |
| int | getNumPostSmoothingSweeps () const |
| Get the number of post-smoothing sweeps employed by the preconditioner. More... | |
| SAMRAI::tbox::Pointer< FACPreconditionerStrategy > | getFACPreconditionerStrategy () const |
| Get the FAC preconditioner strategy objects employed by the preconditioner. More... | |
| void | getFromInput (SAMRAI::tbox::Pointer< SAMRAI::tbox::Database > db) |
| SAMRAI::tbox::Pointer< FACPreconditionerStrategy > | d_fac_strategy |
| SAMRAI::tbox::Pointer< SAMRAI::hier::PatchHierarchy< NDIM > > | d_hierarchy |
| int | d_coarsest_ln = 0 |
| int | d_finest_ln = 0 |
| MGCycleType | d_cycle_type = V_CYCLE |
| int | d_num_pre_sweeps = 0 |
| int | d_num_post_sweeps = 2 |
| void | FACVCycleNoPreSmoothing (SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &u, SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &f, int level_num) |
| void | muCycle (SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &u, SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &f, SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &r, int level_num, int mu) |
| void | FCycle (SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &u, SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &f, SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &r, int level_num) |
| void | FMGCycle (SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &u, SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &f, SAMRAI::solv::SAMRAIVectorReal< NDIM, double > &r, int level_num, int mu) |
Logging functions. | |
| virtual void | printClassData (std::ostream &stream) override |
| Print class data to stream. More... | |
| bool | d_initial_guess_nonzero = true |
| bool | d_nullspace_contains_constant_vec = false |
| std::vector< SAMRAI::tbox::Pointer< SAMRAI::solv::SAMRAIVectorReal< NDIM, double > > > | d_nullspace_basis_vecs |
Logging functions. | |
| virtual void | setLoggingEnabled (bool enable_logging=true) |
| Enable or disable logging. More... | |
| virtual bool | getLoggingEnabled () const |
| Determine whether logging is enabled or disabled. More... | |
| std::string | d_object_name = "unitialized" |
| bool | d_is_initialized = false |
| bool | d_homogeneous_bc = false |
| double | d_solution_time = std::numeric_limits<double>::quiet_NaN() |
| double | d_current_time = std::numeric_limits<double>::quiet_NaN() |
| double | d_new_time = std::numeric_limits<double>::quiet_NaN() |
| double | d_rel_residual_tol = 0.0 |
| double | d_abs_residual_tol = 0.0 |
| int | d_max_iterations = 100 |
| int | d_current_iterations = 0 |
| double | d_current_residual_norm = std::numeric_limits<double>::quiet_NaN() |
| SAMRAI::tbox::Pointer< HierarchyMathOps > | d_hier_math_ops |
| bool | d_hier_math_ops_external = false |
| bool | d_enable_logging = false |
| void | init (const std::string &object_name, bool homogeneous_bc) |
| virtual void | initSpecialized (const std::string &object_name, bool homogeneous_bc) |
Constructor & Destructor Documentation
◆ PoissonFACPreconditioner() [1/3]
| IBTK::PoissonFACPreconditioner::PoissonFACPreconditioner | ( | const std::string & | object_name, |
| SAMRAI::tbox::Pointer< PoissonFACPreconditionerStrategy > | fac_strategy, | ||
| SAMRAI::tbox::Pointer< SAMRAI::tbox::Database > | input_db, | ||
| std::string | default_options_prefix | ||
| ) |
Constructor.
◆ ~PoissonFACPreconditioner()
|
default |
Destructor.
◆ PoissonFACPreconditioner() [2/3]
|
privatedelete |
- Note
- This constructor is not implemented and should not be used.
◆ PoissonFACPreconditioner() [3/3]
|
privatedelete |
- Note
- This constructor is not implemented and should not be used.
- Parameters
-
from The value to copy to this object.
Member Function Documentation
◆ setPoissonSpecifications()
|
overridevirtual |
Reimplemented from IBTK::PoissonSolver.
◆ setPhysicalBcCoef()
|
overridevirtual |
- Note
- bc_coef may be nullptr. In this case, default boundary conditions (as supplied to the class constructor) are employed.
- Parameters
-
bc_coef Pointer to an object that can set the Robin boundary condition coefficients
Reimplemented from IBTK::PoissonSolver.
◆ setPhysicalBcCoefs()
|
overridevirtual |
- Note
- Any of the elements of bc_coefs may be nullptr. In this case, default boundary conditions (as supplied to the class constructor) are employed for that data depth.
- Parameters
-
bc_coefs Vector of pointers to objects that can set the Robin boundary condition coefficients
Reimplemented from IBTK::PoissonSolver.
◆ operator=()
|
privatedelete |
- Note
- This operator is not implemented and should not be used.
- Parameters
-
that The value to assign to this object.
- Returns
- A reference to this object.
◆ setHomogeneousBc()
|
overridevirtualinherited |
Reimplemented from IBTK::GeneralSolver.
◆ setSolutionTime()
|
overridevirtualinherited |
Reimplemented from IBTK::GeneralSolver.
◆ setTimeInterval()
|
overridevirtualinherited |
Reimplemented from IBTK::GeneralSolver.
◆ solveSystem()
|
overridevirtualinherited |
Before calling solveSystem(), the form of the solution x and right-hand-side b vectors must be set properly by the user on all patch interiors on the specified range of levels in the patch hierarchy. The user is responsible for all data management for the quantities associated with the solution and right-hand-side vectors. In particular, patch data in these vectors must be allocated prior to calling this method.
- Parameters
-
x solution vector b right-hand-side vector
Conditions on Parameters:
- vectors x and b must have same patch hierarchy
- vectors x and b must have same structure, depth, etc.
- Note
- The vector arguments for solveSystem() need not match those for initializeSolverState(). However, there must be a certain degree of similarity, including:
- hierarchy configuration (hierarchy pointer and range of levels)
- number, type and alignment of vector component data
- ghost cell widths of data in the solution x and right-hand-side b vectors
- Note
- The solver need not be initialized prior to calling solveSystem(); however, see initializeSolverState() and deallocateSolverState() for opportunities to save overhead when performing multiple consecutive solves.
- Returns
trueif the solver converged to the specified tolerances,falseotherwise
Implements IBTK::GeneralSolver.
◆ initializeSolverState()
|
overridevirtualinherited |
By default, the solveSystem() method computes some required hierarchy dependent data before solving and removes that data after the solve. For multiple solves that use the same hierarchy configuration, it is more efficient to:
- initialize the hierarchy-dependent data required by the solver via initializeSolverState(),
- solve the system one or more times via solveSystem(), and
- remove the hierarchy-dependent data via deallocateSolverState().
Note that it is generally necessary to reinitialize the solver state when the hierarchy configuration changes.
When linear operator or preconditioner objects have been registered with this class via setOperator() and setPreconditioner(), they are also initialized by this member function.
- Parameters
-
x solution vector b right-hand-side vector
Conditions on Parameters:
- vectors x and b must have same patch hierarchy
- vectors x and b must have same structure, depth, etc.
- Note
- The vector arguments for solveSystem() need not match those for initializeSolverState(). However, there must be a certain degree of similarity, including:
- hierarchy configuration (hierarchy pointer and range of levels)
- number, type and alignment of vector component data
- ghost cell widths of data in the solution x and right-hand-side b vectors
- Note
- It is safe to call initializeSolverState() when the state is already initialized. In this case, the solver state is first deallocated and then reinitialized.
- See also
- deallocateSolverState
Reimplemented from IBTK::GeneralSolver.
◆ deallocateSolverState()
|
overridevirtualinherited |
When linear operator or preconditioner objects have been registered with this class via setOperator() and setPreconditioner(), they are also deallocated by this member function.
- Note
- It is safe to call deallocateSolverState() when the solver state is already deallocated.
- See also
- initializeSolverState
Reimplemented from IBTK::GeneralSolver.
◆ setInitialGuessNonzero()
|
overridevirtualinherited |
Reimplemented from IBTK::LinearSolver.
◆ setMaxIterations()
|
overridevirtualinherited |
Reimplemented from IBTK::GeneralSolver.
◆ setMGCycleType()
|
inherited |
◆ getMGCycleType()
|
inherited |
◆ setNumPreSmoothingSweeps()
|
inherited |
◆ getNumPreSmoothingSweeps()
|
inherited |
◆ setNumPostSmoothingSweeps()
|
inherited |
◆ getNumPostSmoothingSweeps()
|
inherited |
◆ getFACPreconditionerStrategy()
|
inherited |
◆ FACVCycleNoPreSmoothing()
|
protectedinherited |
◆ muCycle()
|
protectedinherited |
◆ FCycle()
|
protectedinherited |
◆ FMGCycle()
|
protectedinherited |
◆ getFromInput()
|
privateinherited |
◆ setNullSpace()
|
virtualinherited |
Implementations can require the nullspace basis vectors to be orthogonal but should not assume the basis vectors to be orthonormal. If the basis vectors are not orthonormal, the solver may normalize them in place.
Reimplemented in IBTK::PETScLevelSolver, and IBTK::PETScKrylovLinearSolver.
◆ getNullSpaceContainsConstantVector()
|
virtualinherited |
◆ getNullSpaceBasisVectors()
|
virtualinherited |
◆ getInitialGuessNonzero()
|
virtualinherited |
Reimplemented in IBTK::PETScPCLSWrapper.
◆ printClassData()
|
overridevirtualinherited |
Reimplemented from IBTK::GeneralSolver.
◆ getName()
|
inherited |
◆ getIsInitialized()
|
virtualinherited |
◆ getHomogeneousBc()
|
virtualinherited |
◆ getSolutionTime()
|
virtualinherited |
◆ getTimeInterval()
|
virtualinherited |
◆ getDt()
|
virtualinherited |
◆ setHierarchyMathOps()
|
virtualinherited |
Reimplemented in IBTK::NewtonKrylovSolver, and IBTK::KrylovLinearSolver.
◆ getHierarchyMathOps()
|
virtualinherited |
◆ getMaxIterations()
|
virtualinherited |
Reimplemented in IBTK::PETScPCLSWrapper.
◆ setAbsoluteTolerance()
|
virtualinherited |
Reimplemented in IBTK::PETScPCLSWrapper.
◆ getAbsoluteTolerance()
|
virtualinherited |
Reimplemented in IBTK::PETScPCLSWrapper.
◆ setRelativeTolerance()
|
virtualinherited |
Reimplemented in IBTK::PETScPCLSWrapper.
◆ getRelativeTolerance()
|
virtualinherited |
Reimplemented in IBTK::PETScPCLSWrapper.
◆ getNumIterations()
|
virtualinherited |
Reimplemented in IBTK::PETScPCLSWrapper, IBTK::BJacobiPreconditioner, and IBTK::BGaussSeidelPreconditioner.
◆ getResidualNorm()
|
virtualinherited |
Reimplemented in IBTK::PETScPCLSWrapper, IBTK::BJacobiPreconditioner, and IBTK::BGaussSeidelPreconditioner.
◆ setLoggingEnabled()
|
virtualinherited |
◆ getLoggingEnabled()
|
virtualinherited |
◆ init()
|
protectedinherited |
◆ initSpecialized() [1/2]
|
protectedvirtualinherited |
Reimplemented in IBTK::PoissonSolver.
◆ initSpecialized() [2/2]
|
overrideprotectedvirtualinherited |
Reimplemented from IBTK::GeneralSolver.
Member Data Documentation
◆ d_fac_strategy
|
protectedinherited |
◆ d_hierarchy
|
protectedinherited |
◆ d_coarsest_ln
|
protectedinherited |
◆ d_finest_ln
|
protectedinherited |
◆ d_cycle_type
|
protectedinherited |
◆ d_num_pre_sweeps
|
protectedinherited |
◆ d_num_post_sweeps
|
protectedinherited |
◆ d_initial_guess_nonzero
|
protectedinherited |
◆ d_nullspace_contains_constant_vec
|
protectedinherited |
◆ d_nullspace_basis_vecs
|
protectedinherited |
◆ d_object_name
|
protectedinherited |
◆ d_is_initialized
|
protectedinherited |
◆ d_homogeneous_bc
|
protectedinherited |
◆ d_solution_time
|
protectedinherited |
◆ d_current_time
|
protectedinherited |
◆ d_new_time
|
protectedinherited |
◆ d_rel_residual_tol
|
protectedinherited |
◆ d_abs_residual_tol
|
protectedinherited |
◆ d_max_iterations
|
protectedinherited |
◆ d_current_iterations
|
protectedinherited |
◆ d_current_residual_norm
|
protectedinherited |
◆ d_hier_math_ops
|
protectedinherited |
◆ d_hier_math_ops_external
|
protectedinherited |
◆ d_enable_logging
|
protectedinherited |
◆ d_poisson_spec
|
protectedinherited |
◆ d_default_bc_coef
|
protectedinherited |
◆ d_bc_coefs
|
protectedinherited |
The documentation for this class was generated from the following file:
- ibtk/include/ibtk/PoissonFACPreconditioner.h